










Kod QR

Tentang kita
Produk
Hubungi Kami

telefon

E-mel

Alamat
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China

1 、 Gambaran Keseluruhan Projek
Pelan ini bertujuan untuk menyesuaikan sistem platform amalan pendidikan robot untuk memenuhi keperluan pengajaran makmal universiti dalam penglihatan mesin dan kawalan daya. Sistem ini akan dibangunkan di sekitar robot kolaboratif Aubo-I5, kamera industri Hikvision, kamera 3D, dan enam sensor daya paksi untuk mencapai fungsi seperti kawalan robot, pemeriksaan visual, dan pemasangan kawalan daya, dan menyediakan perisian komputer atas sumber terbuka untuk pengembangan fungsi kemudian.

2 、 Komposisi Perkakasan Sistem
Robot: Mengadopsi robot kolaboratif Aubo-I5, ia mempunyai ciri-ciri ketepatan tinggi dan keselamatan yang tinggi, dan sesuai untuk pengajaran senario.
Kamera: Termasuk kamera perindustrian Hikvision dan kamera 3D, digunakan untuk mendapatkan maklumat imej bahan kerja, menyokong pemprosesan imej tradisional dan pengesanan imej pembelajaran mendalam.
Sensor kuasa enam dimensi: Kunwei (KWR75) atau jenama lain dipilih untuk pemantauan masa nyata maklumat interaksi daya antara effector akhir robot dan bahan kerja.
3 、 Reka bentuk perisian komputer atas
Fungsi Asas:
Kawalan Robot: Melaksanakan fungsi seperti sambungan, pemotongan, kawalan bersama atau postur robot.
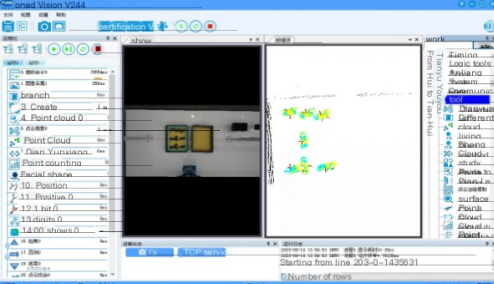
Kawalan Kamera: Melaksanakan fungsi seperti sambungan kamera, pemotongan, dan pengambilalihan imej.
Paparan Status: Paparan masa nyata status bersama dan pose robot, parameter status enam sensor daya paksi, dan imej yang ditangkap oleh kamera.
Ciri -ciri eksklusif:
Perhimpunan lubang aci: Melalui operasi komputer atas, digabungkan dengan pemeriksaan visual dan teknologi kawalan daya, fungsi pemasangan automatik lubang aci dicapai.
Reka Bentuk Antara Muka: Antara muka komputer atas harus ringkas, jelas, dan mudah dikendalikan. Antara muka harus memasukkan butang fungsi asas dan kawasan paparan status, serta menyediakan akses kepada fungsi pemasangan lubang aci.
4 、 Pelaksanaan fungsi
Visi Mesin:
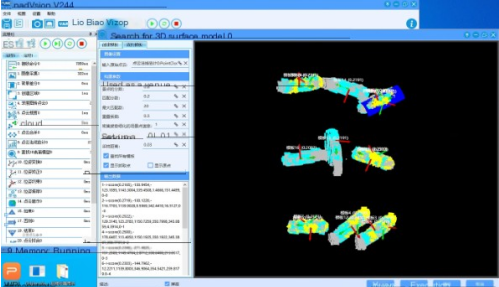
Pengesanan imej tradisional: Menggunakan padanan templat, pemasangan bulatan, pemasangan tepi dan kaedah lain untuk mencari dan mengenali bahan kerja, menyokong pengiktirafan barcode, kod QR, nombor aksara, serta pengiraan kawasan kelabu dan kuantiti plat.
Pengesanan imej pembelajaran yang mendalam: Pengiktirafan automatik dan penyetempatan bahan kerja melalui algoritma pembelajaran mendalam. Walaupun pembelajaran mendalam masih memerlukan anotasi imej manual, kami akan berusaha meningkatkan kecekapan latihan dan ketepatan pengiktirafan, secara beransur -ansur mengurangkan beban kerja anotasi.
Perhimpunan Kawalan Kuasa:
Menggabungkan data dari sensor daya enam dimensi, mencapai kawalan interaksi daya antara effector akhir robot dan bahan kerja, dan lengkap pemasangan lubang aci yang lengkap.
5 、 Risiko projek dan langkah tindak balas
Risiko kerjasama dengan enam sensor daya paksi: disebabkan kekurangan kerjasama dengan enam sensor daya paksi, mungkin terdapat kesulitan teknikal dan ketidakpastian. Kami akan mengatur pasukan teknikal profesional untuk menangani masalah dan memastikan integrasi lancar dan operasi sensor yang stabil.
Risiko Pengesanan Imej Pembelajaran Deep: Pengesanan imej pembelajaran mendalam memerlukan tahap ketepatan dan kecekapan pengiktirafan tertentu, sambil memenuhi keperluan satu latihan klik. Kami akan terus mengoptimumkan algoritma pembelajaran mendalam untuk meningkatkan ketepatan dan kecekapan pengiktirafan, sambil meneroka cara untuk melaksanakan satu latihan klik.
6 、 Pengembangan pasca dan menukar adegan
Perisian komputer atas mengguna pakai reka bentuk sumber terbuka, yang memudahkan pengembangan fungsional dan adegan bertukar seperti yang diperlukan dalam pengajaran kemudian. Sebagai contoh, adegan pemasangan lubang aci boleh dialihkan kepada tugas -tugas seperti meshing gear halus atau pengiktirafan dan menggenggam bahan kerja lain. Dengan mengubahsuai dan menyahpepijat program sumber terbuka, mudah untuk mencapai operasi robot dan fungsi pengesanan visual dalam senario yang berbeza.
Pelan ini mengintegrasikan sumber perkakasan seperti robot, kamera, dan enam sensor daya paksi, digabungkan dengan reka bentuk perisian komputer atas sumber terbuka, untuk menyediakan persekitaran pengajaran yang kaya dan mudah dikembangkan untuk platform amalan pendidikan robot. Melalui penggunaan platform praktikal, pelajar dapat memperoleh pemahaman yang lebih mendalam tentang prinsip dan aplikasi penglihatan mesin dan teknologi kawalan daya, dan meningkatkan kebolehan praktikal dan inovatif mereka.
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China
