










Kod QR

Tentang kita
Produk
Hubungi Kami

telefon

E-mel

Alamat
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China

Gambaran Keseluruhan Projek
Projek ini bertujuan untuk merekabentuk sistem pengecasan automatik trak yang cekap dan stabil untuk memenuhi keperluan pengecasan pelanggan di bawah keadaan pengeluaran dalaman di rantau Shanxi. Sistem ini perlu mencapai operasi dan kawalan kenderaan kejuruteraan, hanya melengkapkan fungsi pengendalian dan pengecasan automatik mata A dan B untuk memenuhi keperluan operasi berterusan garis pengeluaran.
komposisi sistem
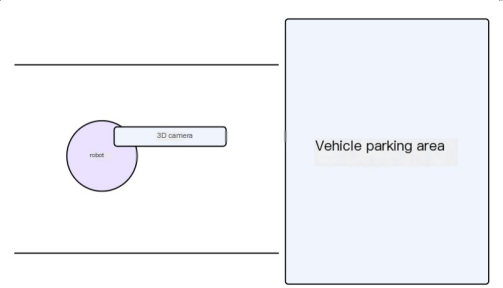
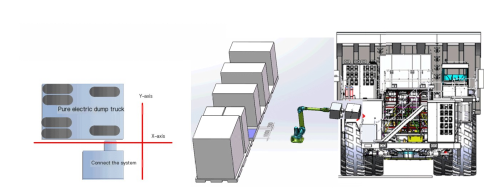
Sistem kedudukan visual: Menggunakan kamera ketepatan tinggi dan algoritma visual untuk mencapai kedudukan tepat pelabuhan pengecasan pada trak dump. Sistem visual perlu mempunyai keupayaan untuk menahan debu dan cahaya matahari langsung, memastikan operasi yang stabil dalam pelbagai persekitaran dalaman.
Robot dan Mekanisme Menolak Pistol: Robot perindustrian dengan rentang lengan 3m atau lebih dipilih, dilengkapi dengan mekanisme menolak senjata yang direka khas. Mekanisme menolak pistol harus mempunyai tujahan dan ketepatan yang mencukupi untuk memastikan pistol pengecasan dapat tepat dan cepat dimasukkan ke dalam port pengecasan.
Sistem Pengecasan: Dilengkapi dengan peralatan pengisian kuasa tinggi sebanyak 3 megawatt, memastikan bahawa trak dump boleh dicas sepenuhnya dalam masa yang singkat dan meningkatkan kecekapan pengeluaran.
Sistem Kawalan: Melalui sistem kawalan bersepadu, kawalan tepat kedudukan visual, gerakan robot, dan proses pengecasan dapat dicapai. Sistem kawalan harus mempunyai ciri -ciri automasi dan kecerdasan yang tinggi, dan dapat mencapai pengecasan automatik tanpa pemandu.
Aliran kerja
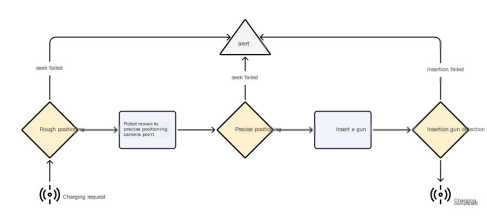
Posisi Lori Pembuangan Sendiri: Kenal pasti dan cari kedudukan pelabuhan pengecasan trak dump melalui sistem kedudukan visual.
Robot Motion: Sistem kawalan membimbing robot untuk bergerak berhampiran pelabuhan pengecasan trak dump berdasarkan hasil kedudukan visual.
Menolak Penyisipan Gun: Robot dilengkapi dengan mekanisme pistol yang menolak, yang dengan tepat dan cepat memasukkan pistol pengecasan ke pelabuhan pengecasan trak dump.
Proses Pengecasan: Sistem pengecasan mula mengecas trak dump sehingga mencapai tahap atau masa kuasa pratetap.
Pemindahan Robot: Selepas pengisian selesai, robot akan mengosongkan pelabuhan pengecasan dan menunggu ketibaan trak dump seterusnya.
Teknologi Utama
Teknologi kedudukan visual: Dengan menggunakan algoritma seperti pembelajaran mendalam, ketepatan dan kestabilan sistem kedudukan visual dapat ditingkatkan.
Teknologi Kawalan Robot: Mengoptimumkan trajektori gerakan robot dan kelajuan untuk meningkatkan kecekapan pengecasan.
Reka bentuk mekanisme menolak senjata: Memastikan mekanisme menolak senjata mempunyai tujahan dan ketepatan yang mencukupi, sambil mempertimbangkan kompak dan kebolehpercayaan strukturnya.
Tindak balas risiko
Perlindungan Alam Sekitar Dalaman: Memastikan persekitaran dalaman yang bersih dan kering, mengurangkan kesan habuk dan cahaya matahari langsung pada sistem kedudukan visual.
Penyelenggaraan Perkakasan: Mengekalkan dan memelihara perkakasan secara berkala seperti robot dan sistem kedudukan visual untuk memastikan operasi normal mereka.
Penilaian Profesional: Jemput profesional untuk menilai dan mengoptimumkan mekanisme menolak senjata, sistem pengecasan, dan lain -lain, untuk memastikan keselamatan dan kelayakan penyelesaian.
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China
