










Kod QR

Tentang kita
Produk
Hubungi Kami

telefon

E-mel

Alamat
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China

Dengan perkembangan teknologi pembuatan pintar yang berterusan, penerapan garis pengeluaran automatik dalam bidang pengeluaran keluli magnet menjadi semakin meluas. Walau bagaimanapun, kaedah pemuatan dan pemunggahan manual tradisional mempunyai masalah seperti kecekapan yang rendah, kualiti yang tidak stabil, dan bahaya keselamatan yang signifikan, yang tidak lagi dapat memenuhi keperluan pengeluaran moden. Sebagai tindak balas kepada isu -isu ini, kami mencadangkan penyelesaian menggunakan robot komposit pintar Fuwei untuk pemuatan dan pemunggahan keluli magnetik, yang bertujuan untuk meningkatkan kecekapan pengeluaran, mengurangkan kos buruh, memastikan keselamatan operasi, dan mencapai automasi dan kecerdasan dalam pengeluaran keluli magnetik.
Mata Kesakitan Industri:
1. Ketergantungan yang tinggi terhadap operasi manual membawa kepada kecekapan pengeluaran yang rendah dan kualiti yang tidak stabil;
2. Terdapat bahaya keselamatan semasa proses operasi, seperti kemalangan seperti mencubit tangan dan kesan;
3. Persekitaran kerja yang lemah menimbulkan ancaman yang berpotensi kepada kesihatan pengendali;
4. Operasi manual sukar untuk memenuhi keperluan pengeluaran besar-besaran dan kecekapan tinggi.

Gambaran Keseluruhan Keperluan dan Penyelesaian Pelanggan
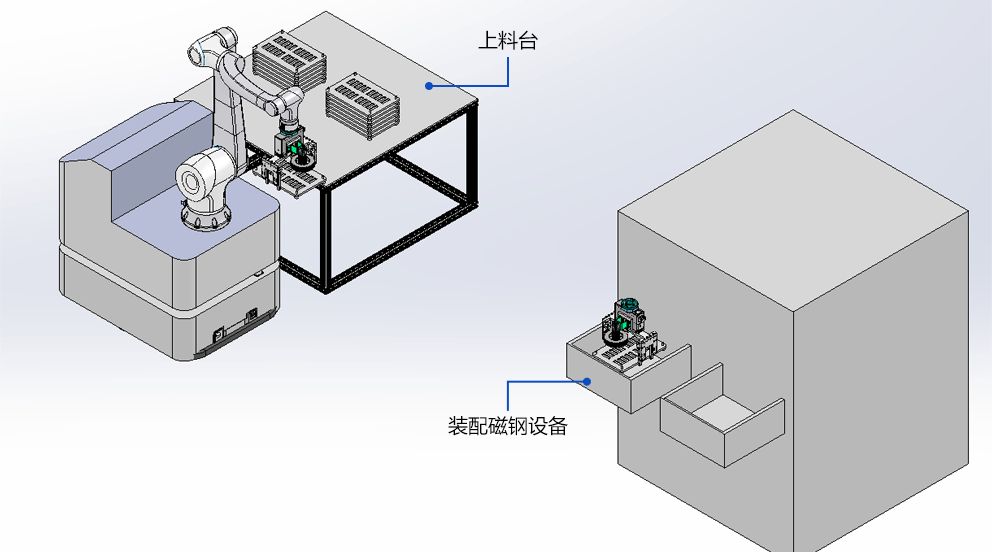
Permintaan Pelanggan: Pelanggan berharap dapat mencapai pemuatan dan pemunggahan keluli magnet secara automatik melalui robot komposit pintar Fuwei, meningkatkan kecekapan pengeluaran dan kestabilan kualiti. Keperluan khusus termasuk melengkapkan pemuatan dan pemunggahan dua jenis produk, dengan masa kitaran kira -kira 80 saat untuk melengkapkan pemuatan dua susunan produk, dan mempunyai keperluan ketepatan yang tinggi.
Gambaran Keseluruhan Penyelesaian
Kami mencadangkan pelan pengubahsuaian berikut untuk memenuhi keperluan pelanggan kami:
1. Gantikan pengawal motor dan servo untuk meningkatkan prestasi dan kestabilan robot;
2. Dilengkapi dengan navigasi radar, jalur cahaya, dan penceramah untuk meningkatkan navigasi, penglihatan, dan interaktiviti autonomi robot;
3. Reka bentuk grippers disesuaikan yang mengintegrasikan kamera dan sensor untuk mencapai pengenalan yang tepat dan menggenggam keluli magnet;
4. Mengoptimumkan susun atur dan konfigurasi peralatan kawasan pemuatan dan pemunggahan untuk memastikan robot dapat menyelesaikan kerja mereka dengan tepat dan cekap.
4 、 Pelaksanaan pelan pengubahsuaian terperinci
Transformasi robot komposit

Pilih motor berprestasi tinggi dan pengawal servo untuk memastikan ketepatan dan kestabilan gerakan robot;
Dilengkapi dengan navigasi radar untuk mencapai kedudukan autonomi dan perancangan laluan robot;
Pasang jalur cahaya LED dan penceramah penggera untuk meningkatkan penglihatan dan interaktiviti robot;
Reka bentuk grippers disesuaikan yang mengintegrasikan kamera dan sensor untuk mencapai pengenalan yang tepat dan mencengkam keluli magnet.
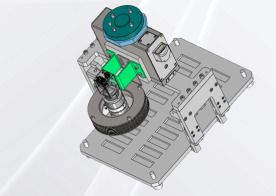
Pengoptimuman kawasan pemuatan
Slot panduan kedudukan reka bentuk untuk membimbing keluli magnet ke kedudukan yang ditetapkan;
Sediakan penanda kedudukan desktop untuk memudahkan pengiktirafan robot dan kedudukan mata yang menggenggam.
Pengubahsuaian kawasan pemunggahan
Tetapkan tanda kedudukan peranti untuk memastikan robot tepat meletakkan keluli magnet;
Pasang pintu panel kawalan elektrik dan slot gelongsor kawalan elektrik untuk melindungi pengendali dari kecederaan dan mencapai pelepasan peralatan automatik.
Logik Pelaksanaan dan Pengoptimuman Proses
Logik pelaksanaan keseluruhan penyelesaian adalah berdasarkan reka bentuk proses garis pengeluaran automatik, memastikan kesinambungan dan kecekapan alur kerja. Seluruh proses dicetuskan oleh permintaan pemuatan, dan robot melakukan operasi pengambilan bahan berdasarkan sama ada kawasan pemuatan sudah siap. Semasa proses memilih dan meletakkan bahan, pengiktirafan dan kawalan daya yang tepat dicapai melalui kamera dan sensor yang diintegrasikan ke dalam penggenggam. Sebaik sahaja magnet berjaya diletakkan pada peralatan, robot akan mengesahkan penyempurnaan pemuatan dan meneruskan ke kitaran seterusnya.
Dengan menggunakan robot komposit pintar Fuwei untuk pemuatan dan pemunggahan keluli magnet, kami dapat menyelesaikan masalah pemuatan dan pemunggahan manual tradisional, meningkatkan kecekapan pengeluaran, mengurangkan kos buruh, dan memastikan keselamatan operasi. Pada masa yang sama, penyelesaian ini juga mempunyai skalabilitas dan fleksibiliti yang tinggi, yang boleh menyesuaikan diri dengan perusahaan pengeluaran keluli magnet dari skala dan keperluan pengeluaran yang berbeza.
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China
