











Kod QR

Tentang kita
Produk
Hubungi Kami

telefon

E-mel

Alamat
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China

Sebagai komponen penting dalam bidang mekanikal dan perindustrian, automasi rod piston yang menggenggam dan penempatan adalah penting untuk meningkatkan kecekapan dan kualiti pengeluaran. Kaedah tongkat omboh tradisional sering bergantung kepada peranti dan sensor mekanikal yang kompleks, yang bukan sahaja mahal tetapi juga terdedah kepada gangguan luaran.
Berdasarkan sejumlah besar tuntutan pelanggan dan amalan projek, Fuwei Pintar telah mengumpulkan teknologi, penyelesaian, dan pengalaman aplikasi yang kaya dengan senario, memunggah dan memunggah senario bahan kerja dan rod. Dengan menggunakan teknologi AI+3D untuk mencapai genggaman positif dan negatif terhadap rod omboh, kesan pengiktirafan awan titik adalah baik, membantu pelanggan meningkatkan kecekapan dan kualiti pengeluaran, dan merealisasikan pengeluaran yang fleksibel.

Penerangan Skim
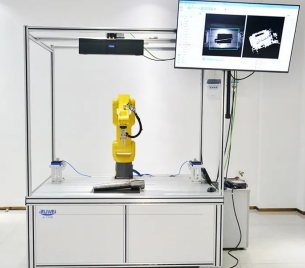
Penyelesaian ini mengintegrasikan sensor visual 3D dan algoritma pintar untuk mencapai pengiktirafan automatik dan menggenggam rod omboh di kedua -dua arah ke hadapan dan terbalik. Pertama, sensor penglihatan 3D menangkap imej tiga dimensi batang omboh dan mengekstrak maklumat bentuk dan kedudukannya. Kemudian, imej diproses dan dianalisis dengan menggunakan algoritma pembelajaran mendalam untuk mengenal pasti depan dan belakang batang omboh. Akhirnya, sistem kawalan merancang jalan yang menggenggam berdasarkan hasil pengiktirafan dan mengawal lengan robot atau peranti yang menggenggam untuk melengkapkan genggaman dan penempatan rod omboh.
Ciri teknikal
1. Pengiktirafan Ketepatan Tinggi: Menggunakan teknologi penglihatan 3D, adalah mungkin untuk menangkap bentuk tiga dimensi dan kedudukan rod omboh, memastikan ketepatan menggenggam.
2. Pengiktirafan Cepat: Algoritma Pembelajaran Deep dapat dengan cepat memproses imej dan mencapai pengiktirafan cepat dari depan dan belakang batang omboh.
3. Kesesuaian yang kuat: Sistem ini boleh menyesuaikan diri dengan rod omboh bentuk dan saiz yang berbeza tanpa memerlukan penyesuaian atau penggantian komponen yang kerap.
4.
Dengan melaksanakan pelan ini, ia dijangka meningkatkan kecekapan dan ketepatan rod omboh yang menggenggam, mengurangkan kos buruh dan risiko keselamatan. Sementara itu, kebolehsuaian dan kemudahan operasi sistem juga akan membawa kemudahan dan nilai yang lebih besar kepada perusahaan.
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China
