











Kod QR

Tentang kita
Produk
Hubungi Kami

telefon

E-mel

Alamat
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China

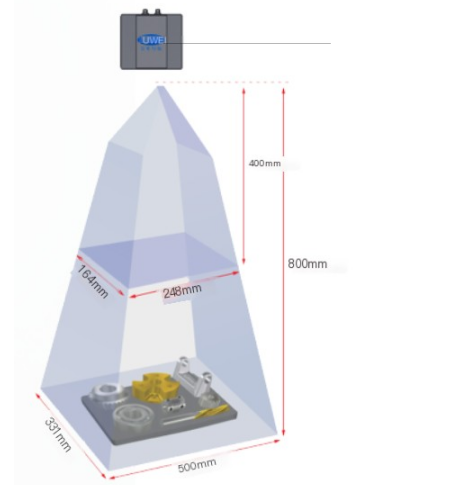
Dalam barisan pemasangan automatik untuk pemprosesan logam lembaran aloi aluminium, ketepatan penempatan pengumpan secara langsung mempengaruhi kualiti akhir dan kecekapan pengeluaran produk. Bagaimana untuk memastikan bahawa pengumpan dapat dengan tepat meletakkan bahan kerja dalam kedudukan yang ditetapkan di barisan pengeluaran yang sibuk telah menjadi cabaran utama yang dihadapi kami. Hari ini, kami akan memperkenalkan penyelesaian panduan visual 3D kami, yang memastikan ketepatan penempatan feeder mencapai ± 2mm dengan medan pandangan lebar 1500mm dan resolusi kamera sebanyak 20 juta.

1 、 Sistem penglihatan 3D Ketepatan Tinggi
Pertama, penyelesaian kami mengamalkan sistem penglihatan 3D ketepatan tinggi. Sistem ini menggunakan kamera berkelajuan tinggi dan algoritma pemprosesan imej lanjutan untuk menangkap maklumat bahan kerja masa nyata di barisan pengeluaran dan melakukan pembinaan semula 3D. Dalam bidang pandangan lebar 1500mm, sistem kami dapat dengan jelas mengenal pasti setiap butiran bahan kerja, memberikan sokongan data yang tepat untuk penempatan berikutnya.
2 、 Pengoptimuman Algoritma Pintar
Walau bagaimanapun, bergantung semata-mata pada sistem visual ketepatan tinggi tidak mencukupi. Untuk memastikan ketepatan penempatan bahan mencapai ± 2mm, kita juga perlu mengoptimumkan algoritma. Pasukan R & D kami telah membuat pelarasan dan pengoptimuman yang tepat kepada pelbagai aspek seperti pengiktirafan visual, perancangan laluan, dan kawalan robot melalui eksperimen dan analisis data yang luas.
Dari segi pengiktirafan visual, kami telah mengadopsi pengekstrakan ciri lanjutan dan algoritma yang sepadan, yang dapat mengenal pasti kedudukan dan postur bahan kerja dengan tepat. Dari segi perancangan jalan, kami mempertimbangkan pelbagai faktor seperti trajektori gerakan robot, bentuk dan saiz bahan kerja, dan lain -lain, untuk memastikan bahawa robot dapat diletakkan di sepanjang jalan yang optimum. Dari segi kawalan robot, kami menggunakan motor servo dan pengawal ketepatan tinggi untuk memastikan bahawa robot boleh bergerak mengikut laluan pratetap dan kelajuan.
3 、 Maklum balas dan pelarasan masa nyata
Di samping itu, sistem kami juga mempunyai keupayaan untuk memberikan maklum balas dan pelarasan masa nyata. Semasa proses penempatan robot, sistem kami terus memantau kedudukan dan postur bahan kerja dalam masa nyata dan memakan hasil pemantauan ke sistem kawalan. Sekiranya terdapat sisihan antara kedudukan penempatan sebenar dan kedudukan pratetap, sistem kawalan akan segera menyesuaikan robot untuk memastikan ketepatan penempatan akhir mencapai ± 2mm.
Melalui penyelesaian panduan visual 3D kami, kami telah berjaya meningkatkan ketepatan penempatan feeder dalam pelbagai pemprosesan logam aloi aloi aluminium. Dalam aplikasi praktikal, sistem kami bukan sahaja meningkatkan kecekapan pengeluaran, tetapi juga mengurangkan kadar kecacatan, membawa manfaat ekonomi yang ketara kepada perusahaan.
Ringkasnya, penyelesaian panduan visual 3D kami telah berjaya meningkatkan ketepatan penempatan pengumpan dalam pemprosesan lembaran aloi aluminium melalui sistem visual ketepatan tinggi, pengoptimuman algoritma pintar, dan maklum balas dan pelarasan masa nyata. Pada masa akan datang, kami akan terus mengoptimumkan dan meningkatkan penyelesaian kami, membawa penyelesaian pemprosesan automatik yang lebih cekap dan tepat kepada lebih banyak perusahaan.
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China
