










Kod QR

Tentang kita
Produk
Hubungi Kami

telefon

E-mel

Alamat
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China

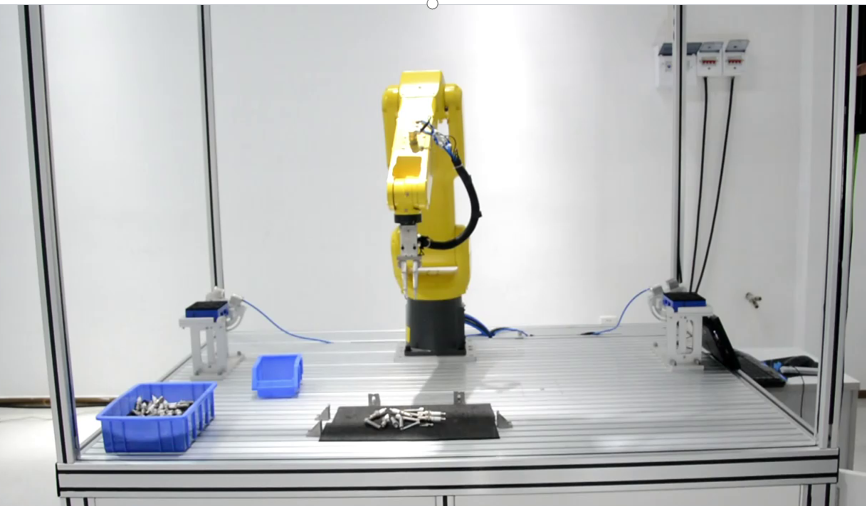
Dengan peningkatan automasi pembuatan yang berterusan, perusahaan bahagian automotif yang besar telah mencadangkan keperluan untuk menggunakan robot komposit untuk menyelesaikan penyortiran bolt untuk meningkatkan kecekapan pengeluaran dan mengurangkan kos buruh. Fuwei pintar menggunakan robot komposit, digabungkan dengan kamera industri 3D dan pengawal prestasi tinggi, untuk mencapai bolt automatik yang menggenggam, dengan itu meningkatkan kecekapan operasi keseluruhan garis pengeluaran.
Kesukaran projek
1. Keperluan Ketepatan Tinggi: Bolt adalah komponen kecil yang memerlukan robot untuk mengenal pasti dengan tepat dan memahami dengan tepat, mengelakkan kerosakan produk atau downtime garis pengeluaran.
2. Robot perlu menyesuaikan diri dengan faktor dinamik seperti kedudukan rak yang berbeza dan perubahan dalam titik mencengkam.
3. Semasa memastikan ketepatan bahan -bahan, adalah perlu untuk mengoptimumkan proses operasi robot dan meningkatkan kecekapan operasi keseluruhan.

Penyelesaian
Dengan menggunakan kamera industri 3D dan pengawal prestasi tinggi, robot dapat dengan tepat mencari komponen bolt dan menyesuaikan strategi yang menggenggam dalam masa nyata melalui pengiktirafan visual, memastikan kestabilan dan ketepatan.
Pengawal bersepadu pintar Fuwei mengumpul isyarat bengkel untuk mencapai integrasi lancar antara robot dan barisan pengeluaran. Kawalan serentak serentak paksi, pelarasan fleksibel trajektori mengikut perubahan dalam rak bahan dan titik mencengkam, menyesuaikan diri dengan persekitaran yang dinamik.
Mengoptimumkan proses kerja rumah, mengurangkan masa menunggu, dan meningkatkan kecekapan meraih. Tetapkan masa kitaran kerja rumah yang munasabah dan laraskan kuantiti merebut dan pemasangan mengikut permintaan untuk memenuhi keperluan sebenar barisan pengeluaran.
Proses Tindakan:
Selepas menerima permintaan merebut bahan, robot komposit mula bergerak ke kedudukan produk yang ditetapkan. Seterusnya, robot akan melaksanakan kedudukan visual untuk memastikan pengiktirafan yang tepat dan menggenggam produk. Semasa proses kedudukan, jika sistem mengesan bahawa bilangan produk kurang daripada nilai yang ditetapkan, ia akan mencetuskan penggera dan cuba menyusun semula. Sekiranya kedudukan berjaya, robot akan terus melaksanakan operasi yang menggenggam; Jika kedudukan gagal, ia akan bergerak ke lokasi produk seterusnya dan cuba lagi. Selepas berjaya menggenggam, robot akan memindahkan produk ke kawasan pemunggahan untuk menyelesaikan operasi pemunggahan. Sepanjang proses keseluruhan, kedudukan visual dan genggaman adalah langkah -langkah utama, memastikan bahawa robot dapat menyelesaikan tugas pemuatan dan pemunggahan dengan tepat.
Kelebihan Teknikal:
Boleh menyesuaikan diri dengan perubahan drastik dalam pencahayaan alam sekitar dan menggantikan buruh manual;
Algoritma Perancangan Perancangan Lengan Pintar dan Algoritma Perancangan Lintasan Berdasarkan Pembelajaran Deep untuk Pengesanan dan Penyetempatan Objek;
Boleh menyesuaikan diri dengan senario di mana pelbagai bahan kerja dihasilkan secara serentak.
Nilai teras:
Mengurangkan kos dan meningkatkan kecekapan, meningkatkan kestabilan, dengan cepat dimasukkan ke dalam pengeluaran dengan operasi mudah, dan dengan cepat menyesuaikan diri dengan produk baru.
Pelan ini akan meningkatkan kecekapan operasi garis pengeluaran. Sementara itu, melalui kedudukan kedudukan dan teknologi yang tepat, risiko kerosakan produk dan downtime garis pengeluaran dapat dikurangkan, meningkatkan kualiti produk dan kestabilan pengeluaran. Di samping itu, kebolehsuaian untuk persekitaran dinamik dan kawalan PACE yang cekap akan meningkatkan lagi kelajuan fleksibiliti dan tindak balas garis pengeluaran, memenuhi keperluan pengeluaran yang sentiasa berubah dari GAC Toyota.
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China
