











Kod QR

Tentang kita
Produk
Hubungi Kami

telefon

E-mel

Alamat
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China

SLAM, juga dikenali sebagai kedudukan serentak dan pembinaan peta, ia adalah teknologi teras penting dalam bidang teknologi robot mudah alih. Ia membolehkan robot secara serentak menganggarkan kedudukan mereka sendiri dan membina peta alam sekitar dalam persekitaran yang tidak diketahui, yang merupakan kunci untuk mencapai navigasi dan penerokaan autonomi.
1 、 Prinsip Teknologi SLAM
Idea teras teknologi SLAM adalah untuk mencapai penyetempatan diri dan pembinaan peta robot dalam persekitaran yang tidak diketahui melalui gabungan dan pemprosesan data sensor (seperti lidar, kamera, dll.). Khususnya, teknologi SLAM terdiri daripada dua bahagian utama: odometri depan dan pengoptimuman back-end.
1. Odometer akhir depan: Bahagian ini bertanggungjawab terutamanya untuk menganggarkan trajektori gerakan robot melalui data sensor. Ia mengira anjakan relatif dan transformasi sikap robot dengan menganalisis perubahan data sensor pada titik masa berturut -turut. Kaedah umum termasuk pencocokan ciri, aliran optik, dan lain-lain. Output odometer depan adalah anggaran awal robot, tetapi disebabkan oleh bunyi sensor dan kesilapan terkumpul, keputusan anggaran ini sering tidak cukup tepat.
2. Pengoptimuman backend: Untuk meningkatkan ketepatan kedudukan dan konsistensi peta, teknologi SLAM memperkenalkan proses pengoptimuman backend. Bahagian ini menggunakan data sejarah, pengesanan gelung, dan kaedah lain untuk menentukur dan mengoptimumkan hasil odometer depan. Kaedah pengoptimuman yang biasa digunakan termasuk kaedah berasaskan penapis (seperti penapis Kalman yang dilanjutkan, penapis zarah, dan lain -lain) dan kaedah pengoptimuman berasaskan graf. Kaedah ini dapat mengurangkan kesilapan kumulatif dan meningkatkan ketepatan kedudukan robot dan pembinaan peta.
3 、 Aplikasi teknologi SLAM dalam robot mudah alih
Teknologi SLAM, sebagai salah satu teknologi teras robot mudah alih, mempunyai prospek aplikasi yang luas dalam pelbagai bidang. Berikut adalah beberapa kes permohonan biasa:
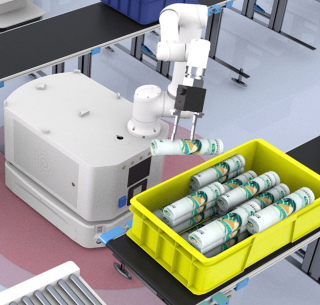
1. Navigasi Autonomi: Dalam bidang pergudangan dan logistik, pemesinan, dan lain -lain, robot mudah alih perlu mencapai fungsi navigasi autonomi. Dengan menggunakan teknologi SLAM, robot dapat melihat persekitaran mereka dalam masa nyata dan membina peta, dengan itu merancang jalan yang optimum dan secara autonomi menuju ke lokasi sasaran. Ini sangat meningkatkan kecekapan kerja dan autonomi robot.
2. Penjelajahan dan Pemodelan Alam Sekitar: Dalam persekitaran yang tidak diketahui, robot mudah alih boleh menggunakan teknologi SLAM untuk penerokaan dan pemodelan alam sekitar. Dengan terus mengumpul data sensor dan mengemas kini maklumat peta.
3. Interaksi Mesin Manusia dan Perkhidmatan Pintar: Dengan perkembangan teknologi kecerdasan buatan yang berterusan, robot mudah alih semakin diterapkan dalam bidang interaksi mesin manusia dan perkhidmatan pintar. Dengan menggunakan teknologi SLAM untuk mencapai kedudukan yang tepat dan pengiktirafan adegan, robot dapat memberikan pengguna pengalaman perkhidmatan yang lebih diperibadikan dan pintar. Sebagai contoh, membimbing pelanggan di pusat membeli -belah dan mengiringi orang tua di rumah mempunyai prospek aplikasi yang luas.
Teknologi SLAM, sebagai salah satu teknologi teras robot mudah alih, memberikan sokongan yang kuat untuk mencapai navigasi autonomi dan penerokaan alam sekitar. Pada masa yang sama, dalam menghadapi senario aplikasi yang kompleks dan sentiasa berubah dan sentiasa menaik taraf tuntutan pengguna, kita juga perlu terus memberi perhatian kepada dan menyelidik teknologi dan kaedah SLAM baru untuk mempromosikan pembangunan dan penerapan teknologi robot mudah alih.
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China
