











Kod QR

Tentang kita
Produk
Hubungi Kami

telefon

E-mel

Alamat
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China

Latar Belakang Projek:
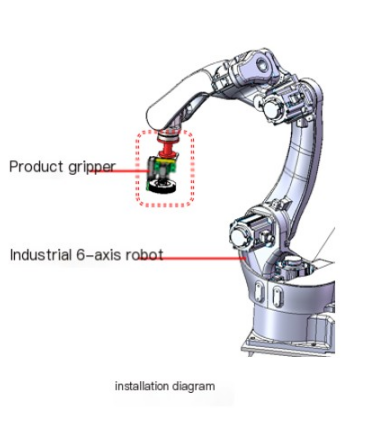
Dengan perkembangan pesat automasi perindustrian, semakin banyak perusahaan berusaha untuk menaik taraf barisan pengeluaran mereka melalui pengenalan teknologi robot pintar. Antaranya, untuk proses deburring, Fuwei pintar menggunakan visi 2D untuk membimbing robot untuk melakukan gerakan bulat, yang bukan sahaja dapat meningkatkan kecekapan pengeluaran, tetapi juga mengurangkan kos buruh dan meningkatkan kualiti produk. Penyelesaian ini bertujuan untuk mewujudkan proses pengeluaran pintar yang sangat automatik.

Kesukaran projek:
Kerja -kerja yang berbeza mungkin mempunyai perbezaan bentuk, tekstur, keadaan pencahayaan, dan lain -lain, yang memerlukan ketepatan kedudukan visual yang tinggi;
Robot perlu melaksanakan trajektori gerakan pekeliling untuk menyelesaikan tugas -tugas deburring, yang memerlukan sistem kawalan robot dapat mengira dan menyesuaikan trajektori gerakan dalam masa nyata;
Kualiti deburring secara langsung mempengaruhi kualiti produk dan kecekapan garis pengeluaran. Bagaimana untuk mencapai proses deburring yang cekap dan stabil, mengelakkan kerosakan pada bahan kerja atau meninggalkan burrs sisa, adalah isu utama yang perlu ditangani dalam projek.
Penyelesaian:
1. Lengkapkan hubungan transformasi antara kedudukan produk dalam bidang pandangan kamera dan kedudukan produk dalam sistem koordinat robot melalui "penentukuran mata tangan";
2. Dengan menggunakan bimbingan visual atau titik pengajaran robot, kamera dapat menangkap imej di pelbagai permukaan objek;
3. Menggunakan algoritma pembetulan penyimpangan imej untuk mencapai perubahan imej yang disebabkan oleh menembak dari sudut yang berbeza;
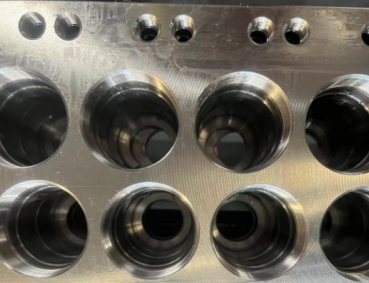
4. 2d pengiktirafan kamera kedudukan lubang produk;
5. Menjana empat mata koordinat berdasarkan kedudukan lubang;
6. Robot menerima empat mata koordinat;
7 Robot menghubungkan empat mata dalam urutan melalui perintah "gerakan pekeliling" untuk melengkapkan pelayaran lubang bulat;
Nilai teras:
Penyelesaian ini mengintegrasikan sistem penglihatan 2D, robot ketepatan tinggi, alat deburring, dan sistem kawalan pintar untuk mencapai pengiktirafan, kedudukan, dan deburring kerja yang tepat. Robot secara automatik merancang dan melaksanakan trajektori gerakan bulat berdasarkan kedudukan dan maklumat postur bahan kerja yang disediakan oleh sistem penglihatan 2D untuk menyelesaikan tugas deburring.
Peningkatan automasi proses deburring telah dicapai dengan mengintegrasikan sistem penglihatan 2D, sistem robot, dan sistem kawalan pintar. Penyelesaian ini bukan sahaja meningkatkan kecekapan pengeluaran dan mengurangkan kos buruh, tetapi juga meningkatkan kualiti produk dan keselamatan garis pengeluaran.
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China
