











Kod QR

Tentang kita
Produk
Hubungi Kami

telefon

E-mel

Alamat
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China

Kami mencadangkan penyelesaian berdasarkan panduan penglihatan 3D untuk memenuhi keperluan automasi untuk menyikat minyak, pengeringan, pemunggahan dan pemunggahan panel aloi aluminium. Penyelesaian ini mencapai pengiktirafan ketepatan tinggi dan kedudukan panel dengan memperkenalkan teknologi penglihatan 3D maju, dengan itu meningkatkan kecekapan pengeluaran dan kestabilan kualiti.
Gambaran keseluruhan rancangan
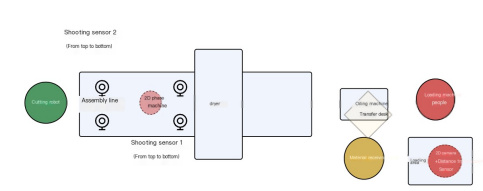
Pelan ini mencapai pengenalan dan kedudukan yang tepat dari panel aloi aluminium dengan mengkonfigurasi sistem penglihatan 3D di kawasan pemuatan dan pemunggahan masing -masing. Kawasan pemakanan mengamalkan kaedah pemakanan sedutan untuk memastikan panel memasuki garisan pengeluaran dengan lancar dan tepat. Kawasan pemunggahan adalah automatik oleh robot untuk merebut dan meletakkan papan. Pada masa yang sama, untuk memastikan bahawa proses minyak tidak bersentuhan dengan bahagian depan produk, kami telah merancang peranti minyak sebagai kaedah atau kaedah minyak.
Pelaksanaan rancangan
Pelaksanaan kawasan pemuatan
Di kawasan pemuatan, kami telah memasang sistem penglihatan 3D yang merangkumi kamera resolusi tinggi dan unit pemprosesan imej. Apabila sensor mengesan bahan kerja, kamera segera mengambil gambar dan menghantar data imej ke unit pemprosesan imej. Unit pemprosesan imej memproses imej melalui algoritma, mengekstrak maklumat kontur dan kedudukan Lembaga, dan mengira nilai Y1 Lembaga. Kemudian, berdasarkan nilai Y1, peranti sedutan dikawal untuk menghisap plat dengan tepat dan memakannya dengan lancar ke garisan pengeluaran.
Pelaksanaan kawasan pemunggahan
Di kawasan pemunggahan, kami juga telah melengkapkan sistem penglihatan 3D dan robot dengan fungsi yang menggenggam ketepatan dan penempatan. Apabila Sensor 1 mengesan bahan kerja, kamera mengambil gambar dan memberikan nilai Y1 produk 1; Seterusnya, apabila Sensor 2 mengesan bahan kerja, robot dengan tepat memegang produk 1 berdasarkan nilai Y1 dan meletakkannya dalam kedudukan yang ditetapkan. Begitu juga, apabila sensor mengesan bahan kerja sekali lagi dan memberikan nilai Y2 produk 2, robot melakukan operasi genggaman dan penempatan sekali lagi. Sepanjang proses ini, kami mengoptimumkan algoritma dan parameter kamera yang dikalibrasi untuk memastikan ketepatan penempatan memenuhi keperluan ± 2mm.

Penyelesaian:
Kami telah mengambil langkah -langkah berikut untuk menangani kesukaran untuk mencapai ketepatan penempatan ± 2mm untuk pengumpan:
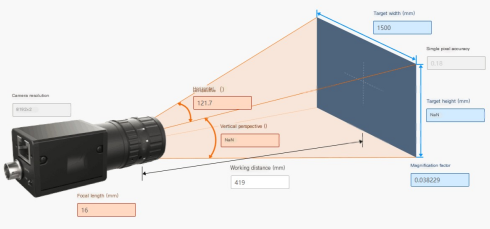
Meningkatkan resolusi kamera dan bidang pandangan lebar: Pilih kamera resolusi yang lebih tinggi untuk meningkatkan ketepatan data imej; Pada masa yang sama, laraskan medan kamera lebar pandangan mengikut keadaan sebenar garis pengeluaran untuk memastikan liputan keseluruhan alur kerja.
Mengoptimumkan algoritma pemprosesan imej: Dengan menjalankan penyelidikan mendalam mengenai ciri-ciri dan tekstur permukaan panel aloi aluminium, mengoptimumkan algoritma pemprosesan imej untuk meningkatkan ketepatan pengiktirafan kontur dan pengiraan kedudukan.
Penentukuran tepat parameter robot: tepat menentukur robot, termasuk parameter seperti panjang dan sudut sendi lengan robot, untuk memastikan kestabilan dan ketepatan yang tinggi semasa operasi menggenggam dan penempatan.
Penyelesaian ini mencapai automasi yang efisien untuk memberus gigi, pengeringan, pemunggahan dan pemunggahan panel aloi aluminium dengan memperkenalkan teknologi penglihatan 3D. Dengan mengoptimumkan algoritma dan parameter peralatan yang tepat, kami telah berjaya menyelesaikan masalah ketepatan penempatan feeder, meningkatkan kecekapan pengeluaran dan kestabilan kualiti.
No. 22, Jalan Hongyuan, Guangzhou, Wilayah Guangdong, China
